SUScape数据集介绍
SUScape数据集介绍
🎯 模块目标:了解SUScape数据集的结构、特点和应用场景
📊 数据集概述
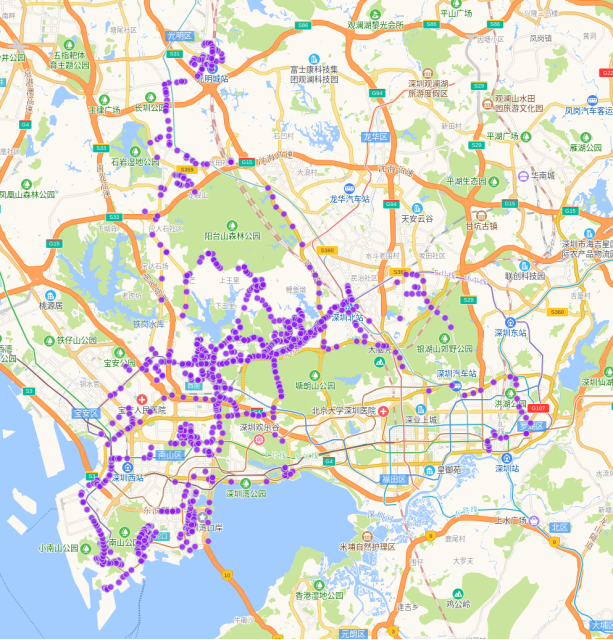
SUScape自动驾驶数据集 是一个大规模自动驾驶数据集,包含丰富的多传感器信息和完整的3D对象标注。数据集精选自深圳超过50小时的驾驶记录,覆盖1059个交通场景,涵盖多种道路类型、光照条件和天气情况。
主要数据统计
- 1059个每个20秒的场景
- 42.3K次激光雷达扫描
- 254K张RGB相机图像
- 254K张红外相机图像
- 2Hz的人工标注
- 1.26M个带追踪ID的3D边界框
- 60K个对象跟踪轨迹
- 36个对象类别
- 包含雨伞、乘客、车门开启等属性
- 自车位姿/激光雷达位姿
数据集样例
数据样例浏览网址(校内访问): https://172.18.35.208:18082 默认登录guest账号,登录后选择scene/frame即可开始浏览 (guest账号没有保存权限)
数据使用说明
硬件平台

| 组件 | 数量 | 型号 | 描述 |
|---|---|---|---|
| 128线束激光雷达 | 1 | Hesai Pandar128 | 单个高精度激光雷达,用于获取环境深度信息 |
| 32线激光雷达 | 4 | robosense BP32 | 布置于车辆四周,覆盖盲区,实现360°检测 |
| 毫米波雷达 | 6 | 华讯方舟 HX-77M01 | 用于监测车辆周边的动态物体 |
| 高清相机 | 6 | 相机:FLIR, BFS-PGE-31S4C-C镜头:4mm焦距 | 360°无死角捕捉环境图像 |
| 红外相机 | 6 | XenicsGobi+ 640 GigE | 用于低光环境下的图像采集 |
| GPS/IMU | 1 | NovAtel PwrPak7D-E1 | 用于提供精确定位和运动姿态数据,支持RTK |
| 时钟同步服务器 | 1 | 保证多传感器数据高精度时钟同步 | |
| 车载工业计算机 | 1 | 高性能数据处理平台,支持传感器数据的实时整合和处理 |
毫米波雷达为2D毫米波雷达,根据安装高度进行平面扫描,探测目标物速度(径向速度,相对自车的速度)及位置。转化为3D坐标点时需要根据高度补充z坐标。
主激光雷达为128线激光雷达,安装在车顶,测量自车周围3D信息,数据包括点坐标(x,y,z)和激光反射强度(intensity)及时间戳
坐标系
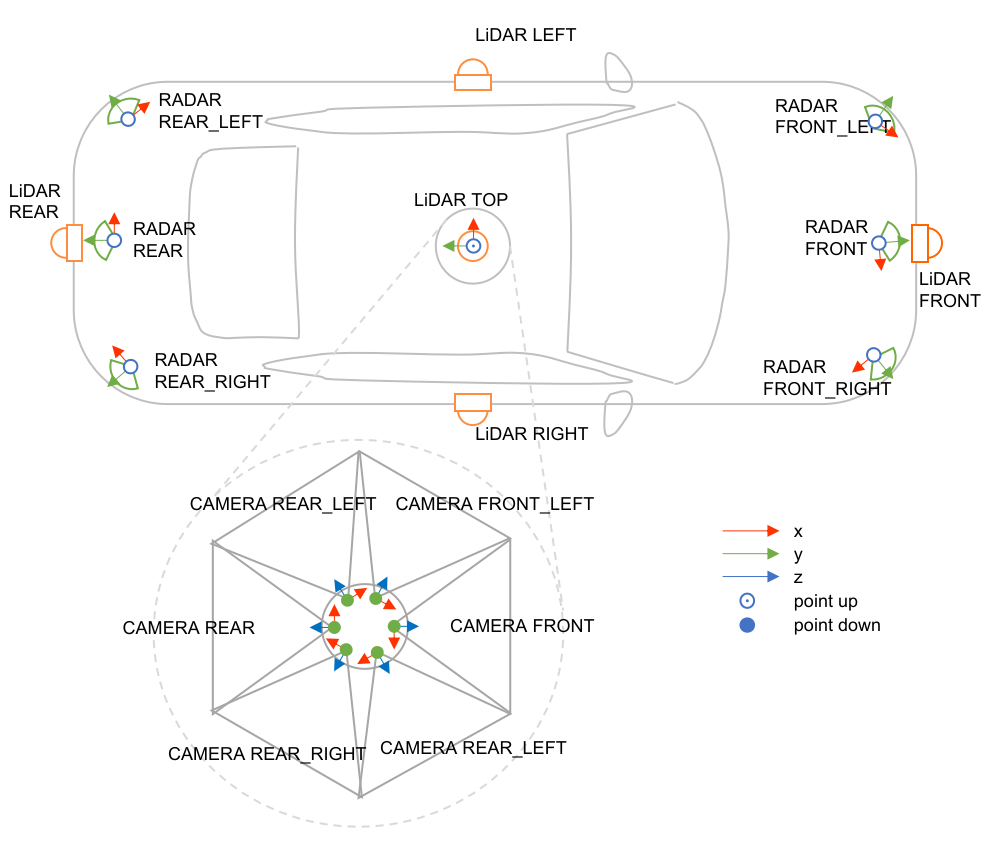
- 主雷达: x左,y后,z上
时间/空间同步
自动驾驶系统中,多传感器协同工作是实现高精度感知与决策的关键。对传感器进行时间同步,可以确保不同设备在同一时刻获取的数据具有一致性,避免因时间延迟而导致数据错位;而空间同步则通过校准各传感器在车辆上的安装位置和朝向,实现数据在统一坐标系下的精准对齐,便于多模态数据融合和综合分析,从而增强场景理解和环境感知的准确性。
- 所有设备时间和GPS时间同步:时间服务器通过PTP/1588协议在设备间同步时间
- GPS/IMU惯导通过GPS/RTK得到GPS定位位置,其他设备间位置信息通过外参确定。
外参是不同设备之间的坐标系变换关系 内参(如相机)是设备内不同的坐标系之间的关系(如图像坐标,相机坐标等)
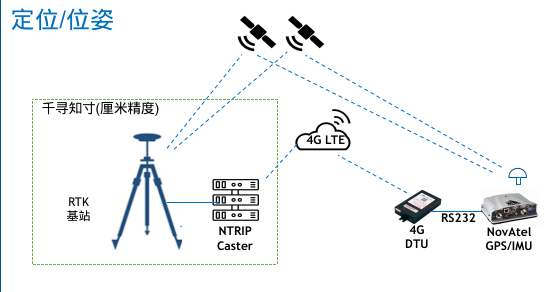
无遮挡情况下,通过GPS信号可以获得误差<1m的定位精度,叠加RTK技术,误差可以达到厘米级别。
RTK(实时动态定位)是一种利用载波相位差分技术实现实时高精度定位的方法。基于基准站与流动站之间的差分信息,RTK能将定位误差降至厘米级,主要应用于自动驾驶、无人机导航及精密工程测量等领域,提供可靠且精准的位置校正。
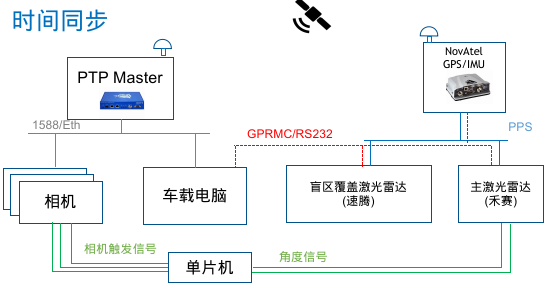
PTP Master和NovTel均同步于GPS时间。相机及车载电脑的时间与PTP Master同步(通过1588协议), 激光雷达通过PPS信号和RS232接口与GPS/IMU设备同步时间。红外相机/毫米波雷达无系统时间,这些数据的时间戳取自车载电脑的时间。
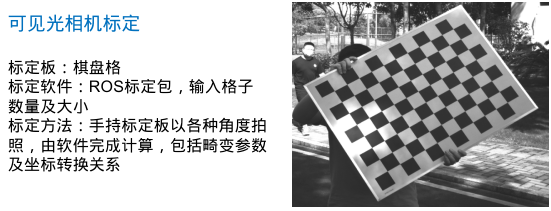
相机内参标定
相机标定是指通过采集一系列标准几何图案的图像(如棋盘格或圆点阵列),来确定相机的内部参数(焦距、主点、镜头畸变等)。这种标定可以提高图像测量和三维重建的准确性,并为后续的视觉处理、目标检测、定位与追踪等任务提供关键数据支持。
标定工具参考 https://wiki.ros.org/camera_calibration
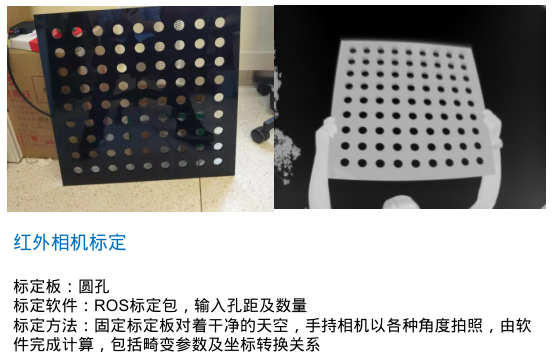
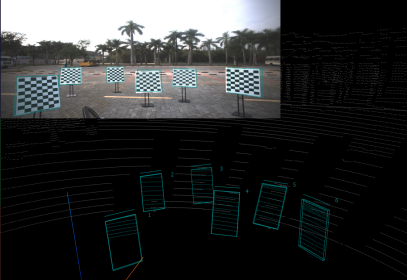
红外相机标定除了几何特性标定外,还有温度的标定,下图显示的是几何特性的标定方法,温度标定我们采用厂家数据。
红外相机标定时需要待标定物和背景有明显的温差,才能检测到几何图案轮廓。我们采用有孔的标定板,选取天空作为背景。
外参标定
-
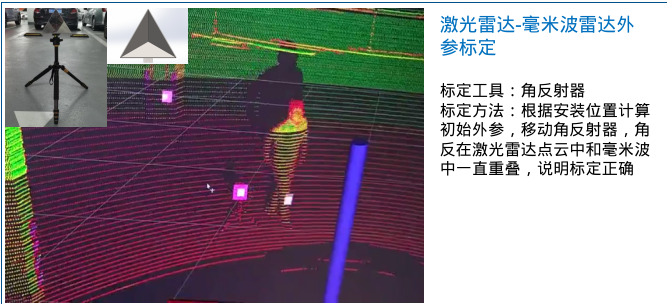
激光雷达和毫米波雷达标定
-
相机和激光雷达标定
- 粗标
通过图片和点云点的对应关系和坐标,计算(优化)外参
- 精细调整工具(手工)

该工具支持实时可视化外侧效果,通过调整相机box的位置和旋转,精细调整外参
-
惯导设备和激光雷达标定
标定效果
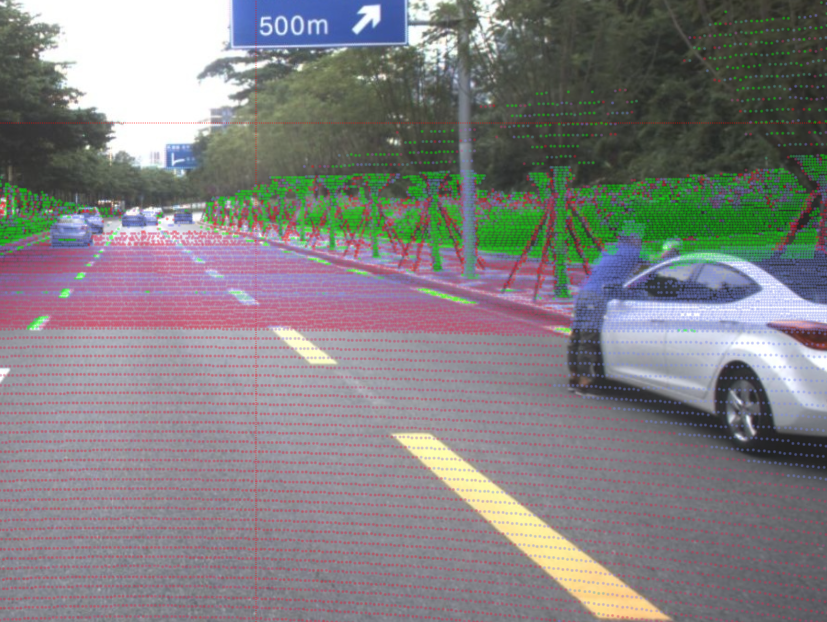
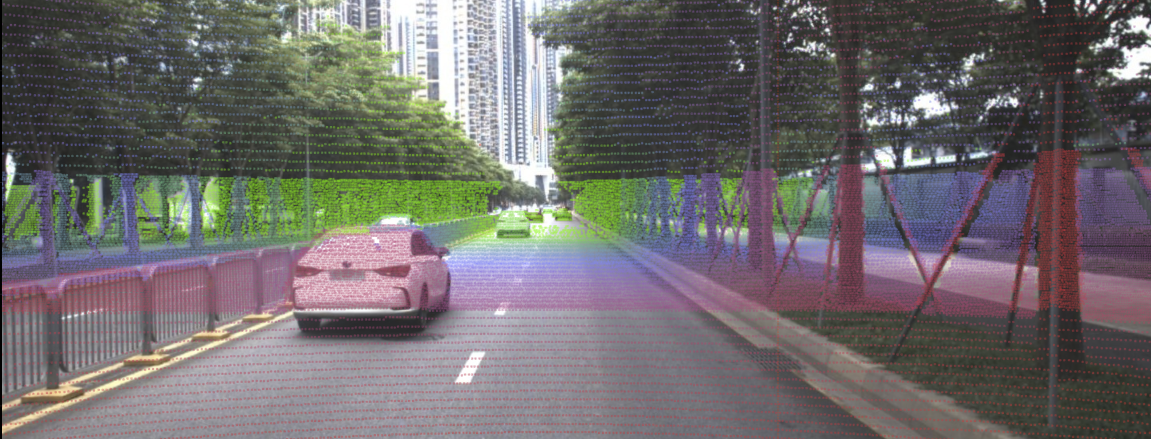
下图为前向相机和主雷达点云标定后的显示效果
数据集构建过程
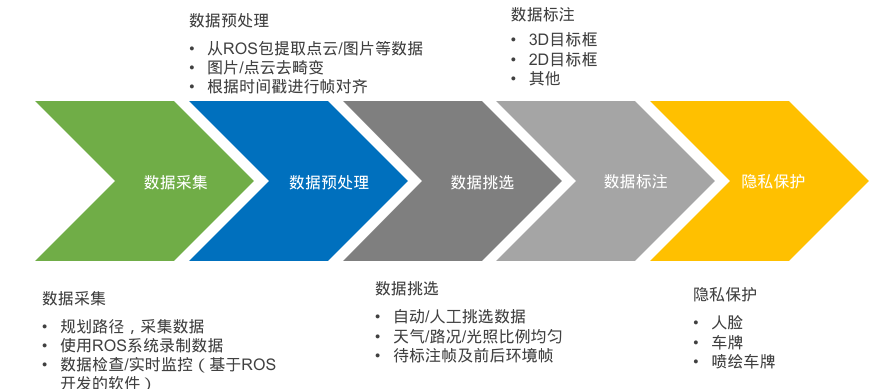
数据采集
本数据集的数据主要在深圳采集。
- 采集软件: 数据采集使用ROS系统,数据存储为rosbag文件格式。
采集软件的主要功能除获取数据并保存到硬盘外,还有监控数据是否正常,是否发生丢帧等功能。
- 采集地点
数据预处理
- 相机图片去畸变
 上图为红外相机去畸变效果,可见畸变的直线(标定板边沿)恢复为直线了。
上图为红外相机去畸变效果,可见畸变的直线(标定板边沿)恢复为直线了。
-
点云去畸变(运动畸变)
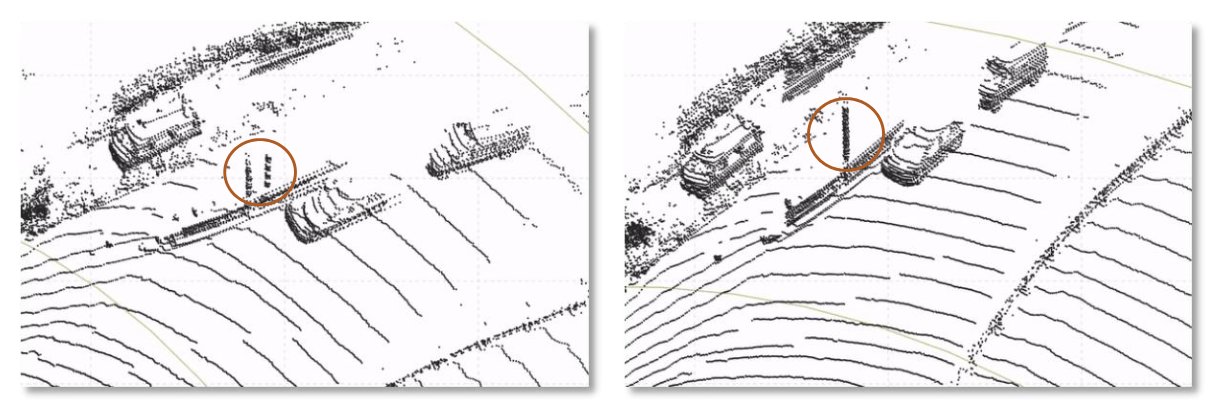
机械雷达产生运动畸变的原因: 当车辆处于运动状态时,机械雷达在进行旋转扫描时,不同角度的测量数据会在不同时间采集。由于车辆在扫描过程中会发生位置和姿态的变化,导致相邻角度的数据存在时间偏差,从而产生运动畸变。这种时间差异使得数据在空间上不能完全对齐,需在后续处理中对采集数据进行时空校正以消除畸变误差。
去畸变原理: 在数据去畸变过程中,我们主要通过运动畸变校正(Motion Distortion Correction)来消除因传感器采集数据时车辆运动产生的时间偏差。此方法利用车辆的即时运动信息(如GPS/IMU数据)和精确的采集时间戳,对每一个数据点进行时空校正,将其映射到一个统一的时间参考系下。
这种校正机制确保融合后数据的几何一致性,并为后续感知与决策提供高精度的基础数据。
-
数据帧对齐
无论激光雷达还是相机图片,从rosbag解包后均按时间戳命名。
数据帧对齐的目的是将不同传感器的数据对应起来,对齐之后的数据文件命名相同,后续使用时能方面的知道那些数据是同一帧的。
我们采用绝对时间对齐方法:
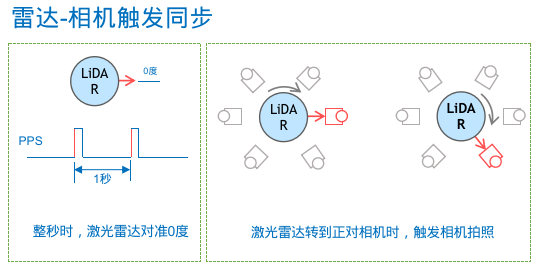
- 通过惯导pps硬件信号(pulse per second),控制主激光雷达(10hz)与0.1s对齐
- 通过雷达-相机触发机制,控制相机触发时间(根据安装角度课集选对应相机的触发时间)
将雷达/相机数据对齐到最近的理想触发时间点,是为帧id.
数据筛选
数据集按场景组织,每个场景时长20秒。根据天气/光照情况/路况/复杂情况等综合考虑选取待标注场景。目前的数据集依靠人工筛选。
数据标注
目前已经完成的标注内容
- 目标3DBox(位置,大小,旋转)
- 目标ID (20s场景内唯一)
- 类别及属性
- 2DBox(通过3Dbox和点云映射生成,部分由人工修正)
具体标注方法参考下一模块介绍。
隐私保护
数据集的隐私保护主要防止敏感信息泄露:确保车辆、行人等可能涉及的个人身份信息(如车牌、面部特征等)得到有效保护,避免隐私被滥用。
- 人脸
- 车牌
- 喷绘车牌号码
我们通过检测算法和人工修正进行关键区域的识别,然后使用高斯filter进行模糊化处理。

图上红色框内为喷绘车牌号码